2020-09-18 12:05:00



EXTREME ENERGY CONTROL AT CURRENT MOMENT
Annotation
The EC&CM method closes the era of technologies and systems of optimal (from Latin optimum - best) control in real time.
As the name suggests, “optimum control” should provide to the managers of, for example, the power grids or the gas system, choose and implement the best solution out of several very good ones. But they have no choice in practice. The only choice for all possible cases was made for them by the developer of the optimal control system. The only choice for all possible cases was made for him by the developer of the optimal control system.
But it is almost impossible to quickly check the quality of such a choice. And "real time" indicates the lack of precise synchronization with the current moment in time.
EC&CM addresses the above disadvantages. It gives the opportunity for utility executive to establish a regime with the best quality criterion and implements it automatically. It may be the maximum productivity, the minimum total costs, the minimum total CO2 emissions, the minimum total fuel costs, or a given compromise between of any extremes. The quality of the selected and implemented solution can be quickly checked. The EC&CM process is precisely synchronized to the current moment in time.
EC&CM is more than 10% more efficient than optimal real-time control.
Introduction
It is obvious that all natural events and phenomena (hereinafter - phenomena) occur only at the current time. And to be absolutely precise - at the current moment in time(hereinafter - current moment). No other is given. The values of the parameters that qualitatively and quantitatively characterize the aforementioned phenomena, the control goal and the operating characteristics of an industrial facility (hereinafter - object) at the current moment are constantly changing. Therefore, these phenomena, goal and operating characteristics, as well as the parameters characterizing these, are called current.
It is also obvious that the subject controls the object at the same current moment, when he receives a set of current parameters necessary for this control. There is no time to use this set. Therefore, the subject controls the object at any current moment based on the parameters received in the past time.
We have created a technology that almost completely compensates for the objective impossibility of applying a set of current parameters for control at the current moment. It is called the Technology of Forecast Calculation in the PRESENT1 (TFCP).
TFCP predicts at the current moment the value of each current parameter that characterizes the current phenomenon. The error in predicting the values of the required parameters at the current moment using this technology is an order of magnitude less than the error of the instruments used to measure these.
The study of the set of definitions of the concept of "optimal control" has shown that in each case we are talking either about the extremum of any one criterion of control quality, or about a compromise between the extrema of several criteria. And the term "optimal" shows that developers fail to achieve the desired extreme or compromise. We have developed and tested in real multidimensional objects the Extreme Control Technology (ECT), which provides extreme modes of their operation.
The Control Action Implementation Technology (TICA) is applied to implement the current control actions at the current moment. TICA changes the positions of the executive bodies of the regulators through given speeds. ECT calculates a set of trends of these speeds for TICA exactly at the beginning of their execution at the current moment.
A new control method has emerged from the merger of TFCP, ECT and TICA. It has been called Extreme Control at Current Moment (EC&CM).
EC&CM was developed and tested in real objects in the development of the Noologistic Control Technology1 (NCT). The name NCT is formed using the ancient Greek words νόος - noo (mind) and logitsich - logistics (the art of calculation).
Brief description of EC&CM
1. Terminology of EC&CM
The terminology of the EC&CM is similar to the terminology of the forecasting theory3 because its mathematical apparatus and algorithms are borrowed.
Objects have one regulator are classified as one-dimensional control objects. An example of a one-dimensional object is a heater with a temperature regulator, a pump with a capacity regulator, an electric motor with a speed regulator, a steam turbine stage with a steam extraction regulator, etc.
Multidimensional control objects include objects consisting of a multiplicity of interconnected one-dimensional objects. One-dimensional objects are interconnected into a multidimensional object by a single technological process. They may be connected to each other in any way, for example mechanically, electrically, hydraulically, chemically, etc. Examples of multidimensional control objects are gas supply, water supply, power supply, heat supply grids, chemical plants, and other similar complex objects in all industries.
Current time is an objective process of successive transformation of future time into past time.
The current moment is the objective boundary between future time and past time, at which all future phenomena, goals and actions of the subject, when controlling an object, turn into past ones.
For comparison: the term “PRESENT” in forecasting theory (analogous to the term "current moment" in EC&CM) is the moment in time at which the FUTURE turns into the PAST.
Future time is a single time scale of trends predicted by the subject relative to the current moment, including the trends of phenomena, goals and actions of the subject in managing the object.
For comparison: the term “FUTURE” according to forecasting theory (analogous to the term "future time" in the EC&CM) is a set of expected values of parameters that characterize the phenomena at the moments of forecasting time.
A future moment in time is a point on a single time scale of trends predicted by the subject relative to the current moment, including trends in phenomena, goals and actions when managing an object.
The past time is a unified scale for recording the time of phenomena relative to the current moment, as well as the goals and actions of the subject, performed while managing the object.
For comparison: the term “PAST” according to forecasting theory (analogous to the term "past time" in the EC&CM) is a set of parameter values that characterize the phenomena at the past moments in time.
The past moment in time is a point on a single scale for registering the time of phenomena relative to the current moment, as well as the goals and actions of the subject, performed while managing the object.
The current parameter is the name of a quantity that qualitatively or quantitatively characterizes the rate of change of the parameter at the current moment. This concept is absent in forecasting theory.
The current operating mode of the object is a set of values of the current parameters that characterize the operation of the control object at the current moment.
The current control action is the value of the rate of forced change in the state of the executive element of the controller of a one-dimensional object at the current moment. Further - the control action.
A set is an aggregate of parameter values that completely provides a solution to the control problem by means of EC&CM.
Control in the mode of the current moment is the process of changing the positions of the executive elements of the regulators at the current moment in accordance with the trends of control actions that correspond to current needs, goals, management experience and to objective phenomena. The main content of this process is transformation of:
- the current parameters of the subject's needs into the current parameters of the management goal;
- the current parameters of the subject's needs, goals, environment, management decisions, control actions, modes of operation of one-dimensional objects - into the management experience;
- the current parameters of the environment, performance characteristics of the controlled object, goals and experience of management - into the current parameters of the management decision;
- the current parameters of the management decision - into the current parameters of the control actions;
- the current parameters of control actions - into the current parameters of the operating mode of the object.
The rest of the concepts used in this article are special, technical and / or generally accepted. They are described in the relevant literature, dictionaries and instructions for the respective equipment.
2. Main function of TFCP in EC&CM
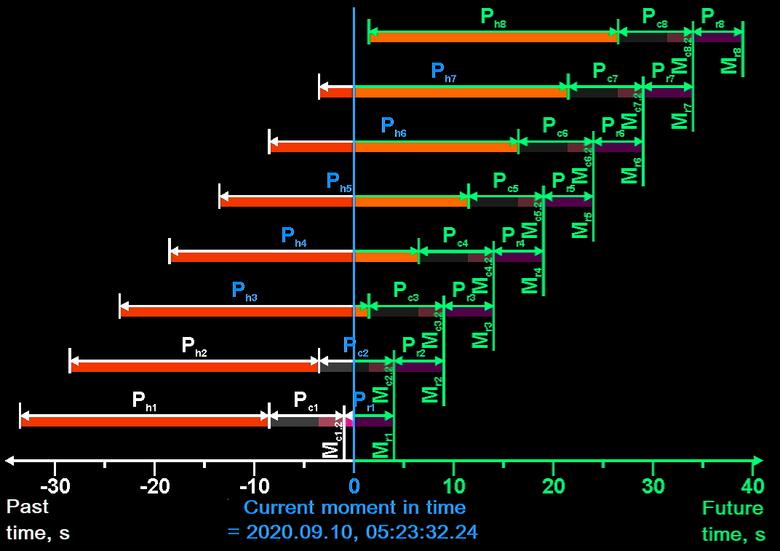
The main function of TFCP is to calculate the trend of the magnitude of one current parameter, characterizing the current phenomenon, relative to the current moment. This parameter may be the temperature of the atmosphere, its pressure, etc. TFCP calculates this trend sequentially in sections. A universal calculation EC&CM cycle is used for each ith section - see Fig. 1. It is borrowed from the forecasting theory3. We applied in EC&CM the usual mathematical apparatus and prediction algorithm used, for example, in EXCEL spreadsheets.

In fig. 1 the following conventions are adopted:
- The designation 2020.09.10, 05: 23: 32.24 corresponds to the current time on September 10, 2020 05 hours 23 minutes 32.24 s.
- Everything that is shown to the left of the current moment refers to the past time;
- Everything that is shown to the right of the current moment refers to the future time;
- Shi.1, Shi.2, Shi.3, …, Shi.j, ..., Shi.J – these are the steps of forming the history of changes in the value of the predicted parameter;
- Sci.1 is the end of the TFCP cycle. It calculates the trend of the predicted parameter for the period Pri;
- Sci.2 and Pri - these periods are described in ECT and TICA - see below fig. 2. Their duration is taken into account when calculating the TFCP trend in the Sci.1 period;
- Symbol i in the subscript is the number of the calculated section of the trend;
- Symbol j in the subscript is the step number of the history of changes in the value of the predicted parameter in the Phi period.
All elements of the cycle shown in Fig. 1 move from right to left in accordance the current time. They continuously “flow” from the future time through the current moment into the past time.
The real EC&CM cycle is more complicated than the cycle described above due to the application of verification of the collected information, selection of the best dynamic series from the set of known ones, calibration of calculation results, etc. It provides a forecast error by an order of magnitude less than any device for measuring the values of the corresponding parameter. The duration of the calculation is a fraction of a second. Microchips may be used to implement TFCP. For more details on TFCP, see the book The Noo Logistics1.
3. Main function of ECT in EC&CM
The main function of ECT is to calculate an extreme set of values of control actions to all one-dimensional objects of a multidimensional object. This set provides an extremum of the total value of a given control criterion in the entire multidimensional object. This extremum may be the maximum productivity, minimum costs, minimum CO2 emissions, etc.
ECT calculates the above set of actions based on the performance characteristics of one-dimensional objects, mathematical dependencies and algorithms from the relevant sciences, as well as the parameters of the phenomena, the goal, the allowed modes, etc. The calculation is performed in one step without the use of statistical information, iterations, searching for options and choosing from several solutions. The duration of the calculation is fractions of a second, regardless of the scale and complexity of the multidimensional object, subject to all permitted work limits. Microchips may be used to implement ECT.
ECT calculates the several extreme sets of control action values in parallel, if the control goal states a compromise between the extrema of several criteria. The ECT then establishes a compromise between the extremes in accordance to the goal. ECT is described in more detail in the patent2 and the book The Noo Logistics1.
ECT uses trend sections from TFCP in its calculations when it works as part of EC&CM. ECT uses trend sections from TFCP in its calculations when it operates as part of EC&CM. Therefore, the result of the calculation is the sections of trends in the values of control actions on the object. The period of ECT operation in the EC&CM cycle in Fig. 1 is shown by the Sci.2 section. The synchronization of EC&CM cycles each other relative to the current point is shown in Fig. 2 below.
4. Main function of TICA in EC&CM
The main function of TICA is to execute an extreme set of trends in the values of control actions on all one-dimensional objects of a multidimensional object. TICA controls the synchronous movement of actuators in all controllers for one-dimensional objects. The speed of movement of each of these at the current moment corresponds to the trend calculated above using ECT.
TICA cascades the EC&CM cycles from fig. 1 for continuous control - see fig. 2.


The current moment in Fig. 1 correspond exactly to the current moment of the 4th EC&CM cycle in Fig. 2. The remaining EC&CM cycles (1st, 2nd, 3rd, 5th, 6th, 7th and 8th) are synchronized so that the beginning of the next Pr(i+1) period at the current moment is the end of the previous Pri period.
Implementation of TICA is possible by any existing technical means.
Conclusions
This article is the first in the world to describe the method of Extreme Control at Current Moment (EC&CM). It combines Extreme Control and Control at Current Moment.
Extreme Control has undeniable advantages over Optimal Control - see our articles Noologistic Control Technology and Boxed software of the Noologistic Control System for multidimensional branch facilities. And its combination to the Control at Current Moment provides accurate synchronization of the execution of extreme control actions to the current parameters of the goal and objective phenomena. In other words, EC&CM provides accurate synchronization of extreme control the object to all other processes affecting it at the current moment. It is impossible to surpass the accuracy of achieving the set goal by means of EC&CM.
In contrast to the generally accepted exact concept of "current moment of time", the generally accepted exact concept of "real time" does not exist. Therefore, the combination of ineffective Optimal Control and inaccurate real time will always be worse compared to EC&CM.
Thus, EC&CM began the era of technologies and systems of Extreme Control at Current Moment and ended the era of technologies and systems of Optimal Control in real time. Companies that shall persevere product the systems of Real-time Optimal Control run the risk of repeating the fate of Nokia.
1 Valery V. Matveev, Vladimir V. Matveev The Noo Logistics . – Kaliningrad. 2018. – 440 p.
2 Valery V. Matveev Gas pipeline regulation method. RF patent No. 1755000 F 17 d 1/00, 1987
Authors
, e-mail: wwmatveev@gmail.com, site: www.noologistics.ru")
Vladimir V. Matveev
Director of NCRE project,
mob. tel.: +79114524562 (Viber, WatsApp), e-mail: wwmatveev@gmail.com;
site: www.noologistics.ru
, e-mail: ELP_Matveev@wp.pl, site: www.noologistics.ru")
Valery V. Matveev
Vice Director for R&D of NCRE project, mob. tel.: +48519792559 (WatsApp), e-mail: ELP_Matveev@wp.pl ,
site: www.noologistics.ru
-----
Earlier:
2020, September, 17, 16:25:00
NUCLEAR POWER IS IMPORTANT
Nuclear energy provides nearly one-third of the world's non-emitting electricity and complementing and enabling other clean energy sources, including renewables.

2020, September, 17, 16:20:00
HYDROGEN ENERGY: ELEPHANT IN THE ROOM
Adding any new expense to the economically failed Wind and Solar solution is not a solution to the root issue - intermittency and demand matching.
2020, September, 16, 11:45:00
DECARBONIZATION FOR CLIMATE
achieving the goal of net emissions neutrality by 2050, and the long-term temperature objectives of Paris, will likely require both aggressive efforts to reduce greenhouse gas emissions, as well as large-scale deployment of so-called carbon dioxide removal (CDR)

2020, September, 16, 11:40:00
ENERGY TRANSITION FOR CLIMATE
as the energy transition continues in its switch from fossil fuels to renewables, the entire energy system gets increasingly disrupted.

2020, September, 16, 11:35:00
INNOVATION FOR ENERGY TRANSITION
This energy system needs to move from today’s reliance of fossil fuels and antiquated infrastructure into one based on clean, sustainable, and renewable energy sources, delivered through a highly distributed infrastructure, designed for the final consumer of the energy.
2020, September, 14, 10:10:00
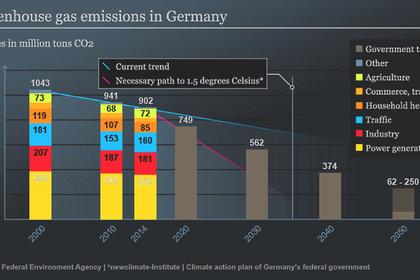
GERMANY CLIMATE TARGETS
Germany itself was already committed to a 55% cut in CO2 emissions by 2030 with the environment minister to present the official German position on the formal EC proposal.
2020, September, 11, 12:05:00
NUCLEAR POWER: TREMENDOUS OPPORTUNITY
That's why I think nuclear has a tremendous opportunity. There is simply not another energy technology before us today that can do the things that nuclear can do.





